Palletizado con un UR10e
El entorno de palletization-single-ur10e es un entorno que nos permite iniciarnos en el mundo de los manipuladores robóticos. A continuación se presenta una imagen del entorno.
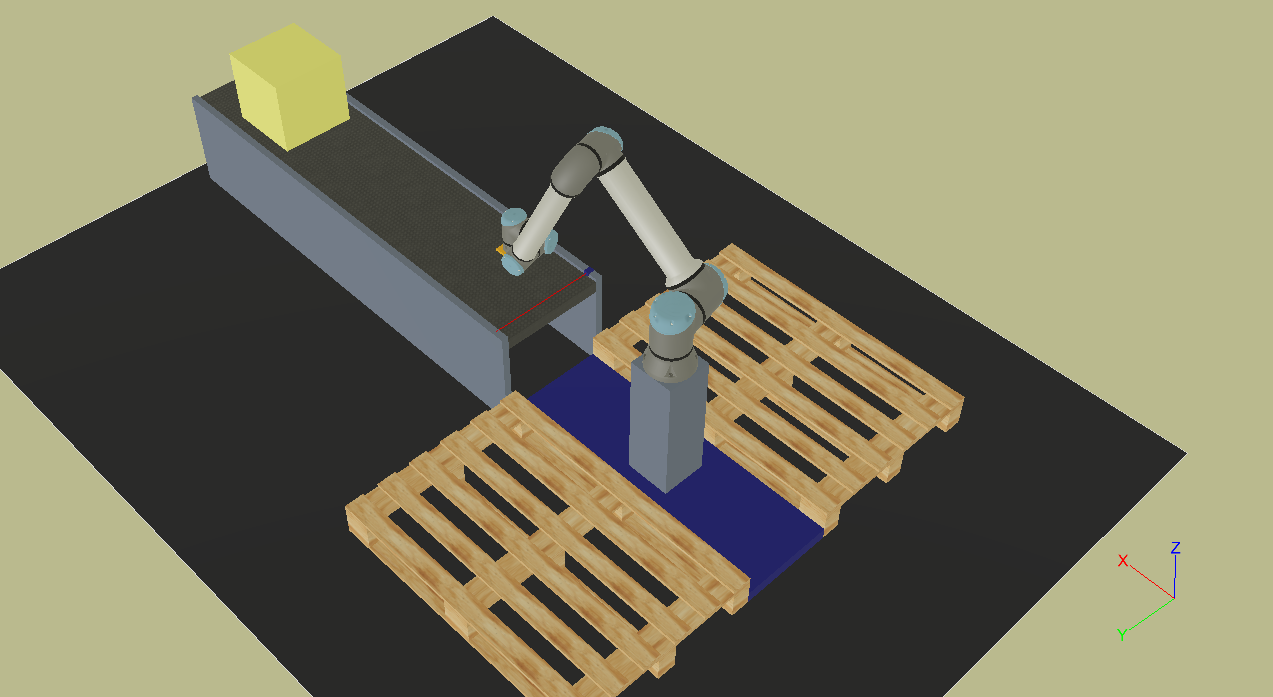
Para abrirlo simplemente abriremos Webots y buscaremos el archivo desde Webots:
..\palletization-single-ur10e\worlds\simulation.wbt
Al abrir el archivo se empezará a correr la simulación. IMPORTANTE tener el contenedor de URSIM corriendo.
Entradas y Salidas
Las entradas y salidas esta configuradas ya en el archivo de instalación simulation.installation y son las siguientes:
| I/O | Registro | Nombre | Descripción |
|---|---|---|---|
| entrada | GPbi[64] | infeed_laser | detector de objetos en la banda de entrada |
| salida | DO[0] | infeed_on | activación de banda de entrada, banda de piezas |
| salida | TO[0] | gripper | activación de la pinza de vacion, low para no succionar, high para succionar |
| salida | AO[1] | outfeed_speed | control de la velocidad de la banda de salida* |
* puede ser controlada en voltaje 0-10V o en corriente 0-4mA.
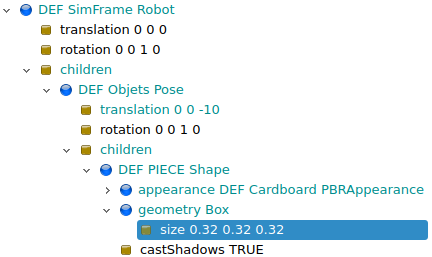
Personalización
Se puede cambiar el tamaño de la caja siguiendo el árbol de la escena:
Pasos para usar este simulador
-
Abrir un terminal en la carpeta del proyecto
palletization-single-UR10e.
-
En dicho terminal correr el comando
docker compose up -d(En Windows debemos tener docker desktop corriendo). - Navegar a la url http://localhost:6080/vnc.html
- Abrir el simulador
worlds/simulation.wbty correr la simulación. - Programar el programa en URSim Polyscope.
- Para finalizar en el terminal correr el comando
docker compose down.